B - Architecture d'un système embarqué
Tout système embarqué, quel que soit son domaine d'application (automobile, médical, électroménager), repose sur une architecture type qui lui permet d'interagir avec le monde réel. Cette architecture suit toujours le même principe, que l'on peut résumer en trois étapes fondamentales : acquérir, traiter, agir.
Acquérir : le système capte des informations venues de l'extérieur grâce à des capteurs.
Traiter : un processeur analyse ces informations en exécutant un programme et prend des décisions.
Agir : le système envoie des commandes à des actionneurs pour modifier le monde réel.
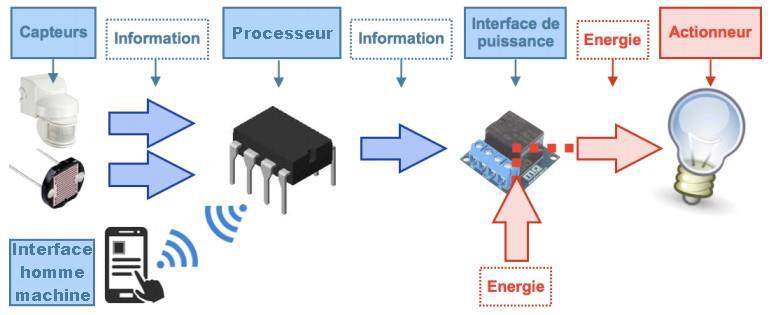
Capteurs
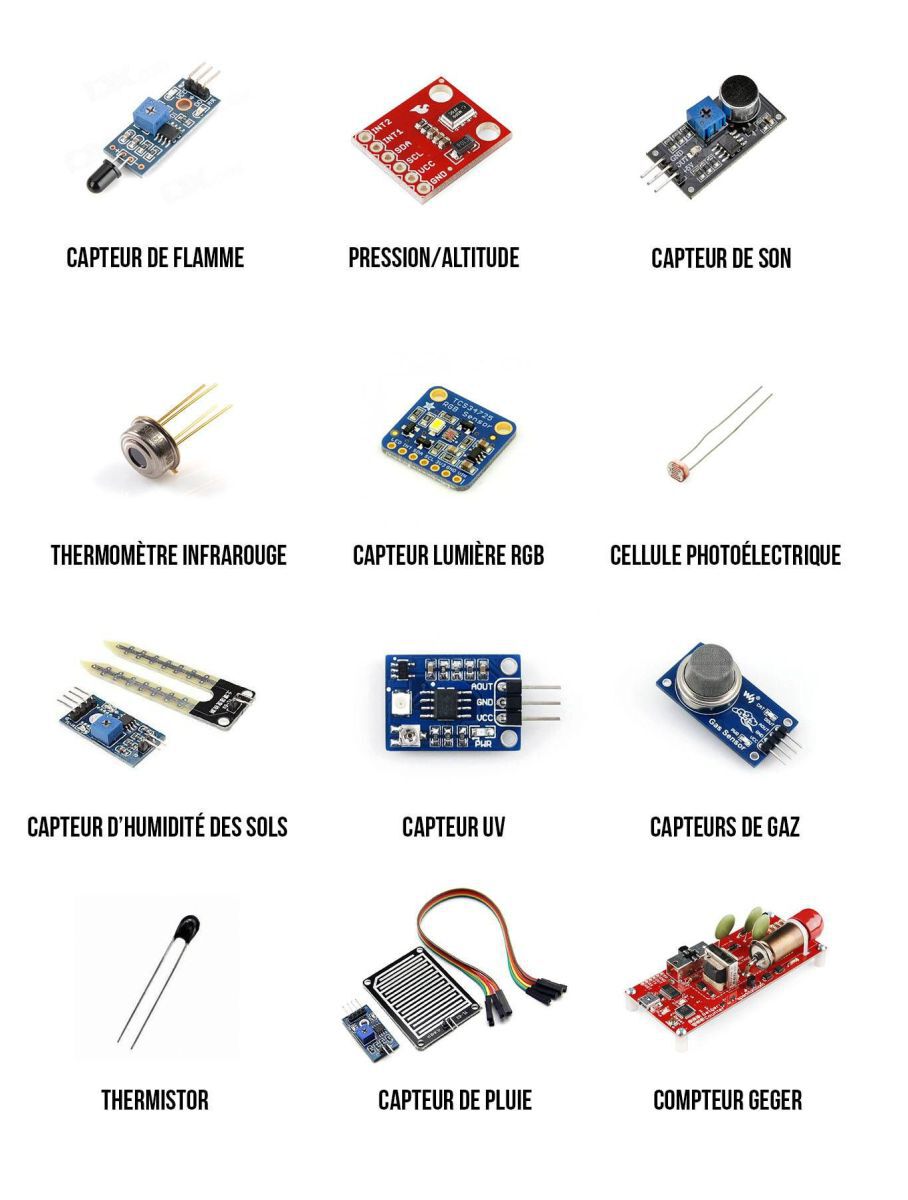
Un capteur est un dispositif qui transforme une grandeur physique mesurée (température, luminosité, pression, vitesse, etc.) en un signal électrique. Cette transformation est essentielle car le système embarqué ne peut comprendre directement le monde physique : il a besoin d'une représentation électrique des phénomènes qu'il doit surveiller.
Le signal électrique produit par le capteur est ensuite converti en données numériques, c'est-à-dire en une série de 0 et de 1 que le processeur peut manipuler. C'est ce travail de conversion qui rend l'information exploitable par le programme.
Les capteurs constituent donc la porte d'entrée du système embarqué vers le monde extérieur. Ils fournissent au programme toutes les informations nécessaires à son fonctionnement : sans eux, le système serait aveugle et incapable de réagir aux événements.
Il existe une très grande variété de capteurs, chacun étant conçu pour mesurer un type spécifique de grandeur physique. Les ingénieurs choisissent le capteur adapté en fonction de ce que le système embarqué doit détecter dans son environnement : capteur de température, capteur de luminosité, capteur de vitesse, accéléromètre, microphone, interrupteur, capteur d'humidité, capteur d'humidité, capteur de gaz...
Actionneurs
Un actionneur est un dispositif qui transforme une commande électrique en phénomène physique : mouvement, lumière, chaleur, son, etc. Alors que le capteur permet au système de percevoir le monde, l'actionneur lui permet d'agir sur lui. C'est grâce à lui que le système peut modifier son environnement et accomplir les tâches pour lesquelles il a été conçu.
Lorsque le programme a pris une décision après avoir analysé les informations des capteurs, il envoie une commande électrique à l'actionneur. Celui-ci convertit cette commande en une action concrète et visible : un moteur se met à tourner, une LED s'allume, un haut-parleur émet un son, une résistance chauffe.
Les actionneurs constituent donc la porte de sortie du système embarqué vers le monde réel. Sans eux, le système pourrait analyser son environnement mais resterait totalement passif, incapable d'intervenir ou de réagir.
Il existe une grande diversité d'actionneurs, chacun étant adapté à un type d'action spécifique. Les ingénieurs les choisissent en fonction de ce que le système doit réaliser : moteur, vérin, résistance chauffante, LED, ampoule, haut-parleur, vanne, laser, afficheur, vibreur, etc...

Système informatique de contrôle
Le système informatique de contrôle est le cœur du système embarqué. C'est lui qui coordonne l'ensemble des opérations et qui donne vie à l'objet intelligent. Son rôle peut se décomposer en trois étapes successives.
Tout d'abord, il reçoit les informations en provenance des capteurs. Ces données électriques, une fois converties en valeurs numériques, lui parviennent en continu pour qu'il ait une image précise de l'état du monde réel.
Ensuite, il traite ces informations à l'aide d'un processeur qui exécute des algorithmes. Le processeur, véritable cerveau de l'opération, lit les instructions du programme les unes après les autres, effectue des calculs, compare des valeurs et prend des décisions en fonction des résultats obtenus.
Enfin, une fois la décision prise, il envoie des commandes appropriées aux actionneurs. Ces ordres électriques déclenchent les actions physiques nécessaires : mettre en marche un moteur, allumer une lumière, chauffer une résistance, etc.
C'est donc le système informatique de contrôle qui exécute le programme et prend toutes les décisions. Il assure la liaison entre la perception du monde (capteurs) et l'action sur celui-ci (actionneurs).
Exemple : Le régulateur de vitesse
Le conducteur fixe une vitesse de consigne, par exemple 130 km/h. Cette valeur représente l'objectif à atteindre et à maintenir.
Pendant tout le trajet, le système mesure en permanence la vitesse réelle du véhicule grâce à un capteur de vitesse. Il compare cette valeur mesurée avec la vitesse de consigne.
Si la voiture aborde une côte et commence à ralentir, l'ordinateur détecte un écart entre la vitesse réelle et la vitesse souhaitée. Il agit alors sur l'accélérateur (l'actionneur) en augmentant l'arrivée de carburant pour rétablir la vitesse.
Si au contraire la voiture s'engage dans une descente et tend à accélérer, l'ordinateur réduit l'accélération, voire freine dans certains systèmes, pour ne pas dépasser la consigne.